Now we are down safely I am starting a map thread. Everything that happens during 2021 will be covered in my still-in-progress atlas, so I have to make the maps for that and everyone can follow as they evolve.
Let me know if any feature names start to show up.
Preliminary map even though not much has happened yet. But if you look closely you will see something, even now.
Phil
Click to view attachment
Full Version: Perseverance Route Map
Lovely stuff, Phil.
Are we seeing evidence of the rock pavement being cleared of dust by the descent engines, to the NE and SW?
And conversely dark streaks towards the NW and SE ?
A very minor observation is that because the gridlines intersect in the middle of Perseverance (as they should), we can't clearly see your lovely little rover symbol!
Looking forward to seeing some white lines appearing soon....
Thanks again.
Are we seeing evidence of the rock pavement being cleared of dust by the descent engines, to the NE and SW?
And conversely dark streaks towards the NW and SE ?
A very minor observation is that because the gridlines intersect in the middle of Perseverance (as they should), we can't clearly see your lovely little rover symbol!
Looking forward to seeing some white lines appearing soon....
Thanks again.
excellent! There's a white blob in the sand-filled crater 1 click SW of the rover. Seems strange for a large boulder to be there, so is that somehow part of the EDL?
Easy test - go find the location in this map. If it's in this map - it's pre-EDL - it's just natural.
You don't mean this by any chance? This is pre-landing.
You don't mean this by any chance? This is pre-landing.
Following up on registering as accurately as possible a well suited rover downlook map image I thought it may be useful to easily look up coordinates and measure distances on the map. Here is a bare bones web app (takes a bit to load) to do that:
http://bit.ly/PercyMAP
with reduced texture for mobile
http://bit.ly/PercyMAPm
It is made using https://www.x3dom.org/ and a little javascript. One can zoom in (wheel or right mouse drag), pan (middle mouse drag) and re-center (double left click). The coordinates of the cross-hair are reported and left clicking adds the current position to a list, and calculates the distance from the last recorded point.
For example, it turns out that the wind-carved walrus boulder (harbour seal) is about 12m away from the rover. The used HiRISE DEM has nominally a 1m resolution but seems smoother than that in places, perhaps not picking up all boulders.
I may add a few additional features (controlling shading, continuous reporting of distance to rover) but nothing fancy to keep it really simple.
[edit] There is now a slider to control vertical exaggeration of the elevation model.
http://bit.ly/PercyMAP
with reduced texture for mobile
http://bit.ly/PercyMAPm
It is made using https://www.x3dom.org/ and a little javascript. One can zoom in (wheel or right mouse drag), pan (middle mouse drag) and re-center (double left click). The coordinates of the cross-hair are reported and left clicking adds the current position to a list, and calculates the distance from the last recorded point.
For example, it turns out that the wind-carved walrus boulder (harbour seal) is about 12m away from the rover. The used HiRISE DEM has nominally a 1m resolution but seems smoother than that in places, perhaps not picking up all boulders.
I may add a few additional features (controlling shading, continuous reporting of distance to rover) but nothing fancy to keep it really simple.
[edit] There is now a slider to control vertical exaggeration of the elevation model.
OK, first drive, first map. It's a close-up, not the overview provided by the first one I posted, which I will come back to as we move more.
This map uses HiRISE for geometric control, with descent images registered to that for more detail, and the first panorama projected out over that.
Phil
Click to view attachment
This map uses HiRISE for geometric control, with descent images registered to that for more detail, and the first panorama projected out over that.
Phil
Click to view attachment
... and so it begins... surprise us!
OK, it did surprise me. We are outside my base map on sol 15, so here is a new map for this drive. That's the problem when you are mapping in real time! Fully prepared to have to switch map bases again tomorrow - that will be back to the first one I posted, most likely.
You may notice that my route is offset a few meters from the one on the interactive map on the mission website - they start a bit too close to the drift behind the rover at landing, and the whole path and each site retains that offset. My site locations are based on hazcam images.
Phil
Click to view attachment
You may notice that my route is offset a few meters from the one on the interactive map on the mission website - they start a bit too close to the drift behind the rover at landing, and the whole path and each site retains that offset. My site locations are based on hazcam images.
Phil
Click to view attachment
I had noticed that offset as well. It seems to me that somehow their rover position to base map registration is a little off.
Looking at the network traffic on https://mars.nasa.gov/mars2020/mission/where-is-the-rover/, it turns out that the traverse and waypoints are plotted with a geojson file.
traverse: https://mars.nasa.gov/mmgis-maps/M20/Layers...0_traverse.json
waypoints: https://mars.nasa.gov/mmgis-maps/M20/Layers..._waypoints.json
The geojson has the actual coordinates, and one can use it directly for mapping:

The traverse is given by small multiple segments, shown as the grey points. The red waypoints have additional rover orientation data, yaw, pitch and roll. yaw is shown on the map.
https://mars.nasa.gov/maps/location/api/con...get?mission=M20 is the overall layer configuration. It has the urls of the geojson geometries.
It seem that the web site uses a terrestrial CRS (WGS84) for plotting. Perhaps the rover coordinates are actually for a Mars CRS. That may explain that slight offset depending on the base map projection.
Looking at the network traffic on https://mars.nasa.gov/mars2020/mission/where-is-the-rover/, it turns out that the traverse and waypoints are plotted with a geojson file.
traverse: https://mars.nasa.gov/mmgis-maps/M20/Layers...0_traverse.json
waypoints: https://mars.nasa.gov/mmgis-maps/M20/Layers..._waypoints.json
The geojson has the actual coordinates, and one can use it directly for mapping:
The traverse is given by small multiple segments, shown as the grey points. The red waypoints have additional rover orientation data, yaw, pitch and roll. yaw is shown on the map.
https://mars.nasa.gov/maps/location/api/con...get?mission=M20 is the overall layer configuration. It has the urls of the geojson geometries.
It seem that the web site uses a terrestrial CRS (WGS84) for plotting. Perhaps the rover coordinates are actually for a Mars CRS. That may explain that slight offset depending on the base map projection.
Click to view attachment
My take at the landing map and first drives. It uses combination of Rover Descent Camera footage combined with HiRise image of Perserverance on the ground. Descent stage exhaust marks are also clearly visible.
The geoJSON files are indeed projected to WGS84 datum, so you only need to change that to Mars projection (both sphere and MOLA work) for the track to align in the right place.
The new interface also offers geoJSON updates for Curiosity's position.
My take at the landing map and first drives. It uses combination of Rover Descent Camera footage combined with HiRise image of Perserverance on the ground. Descent stage exhaust marks are also clearly visible.
The geoJSON files are indeed projected to WGS84 datum, so you only need to change that to Mars projection (both sphere and MOLA work) for the track to align in the right place.
The new interface also offers geoJSON updates for Curiosity's position.
Click to view attachment
Another take at the Perseverance's landing map, with all the hardware location marked. Blue line is EDL track from SPICE kernels (looks like a pre-landing solution).
It's curious that the rover landed less than km from 2018 landing ellipse center.
Another take at the Perseverance's landing map, with all the hardware location marked. Blue line is EDL track from SPICE kernels (looks like a pre-landing solution).
It's curious that the rover landed less than km from 2018 landing ellipse center.
And here is my take:

I am assigning CRS ESRI:104971 - Mars_2000_(Sphere) - Geographic to the geojson coordinates, and use the equirectangular projection for plotting which is native to the HiRISE mosaic.
The arrows show the yaw orientation at the way points.
The little circles along the path are where positions are actually provided in the traverse geojson.
We are getting outside the range of the EDL Rover Downlook imagery. Perhaps it is worth looking through those again to see if there is one covering the new terrain in higher detail than the 25cm HiRISE mosaic.
I am assigning CRS ESRI:104971 - Mars_2000_(Sphere) - Geographic to the geojson coordinates, and use the equirectangular projection for plotting which is native to the HiRISE mosaic.
The arrows show the yaw orientation at the way points.
The little circles along the path are where positions are actually provided in the traverse geojson.
We are getting outside the range of the EDL Rover Downlook imagery. Perhaps it is worth looking through those again to see if there is one covering the new terrain in higher detail than the 25cm HiRISE mosaic.
Map updated to sol 16. I hope for some feature names to add to it, eventually. I will have to re-think my earlier maps a bit. The sol 16 site is just a tiny bit outside the edge of the last map so I can probably adjust it.
It's great to see these alternative views of the traverse here.
Phil
Click to view attachment
It's great to see these alternative views of the traverse here.
Phil
Click to view attachment
Dont know if its the correct site to post this but looking at the orbital view, the rock pavement next to where the rover is sitting right now looks morelike sedimentary to me rather than a lava field and yet i am no geologist so who knows.
I did find a slightly earlier frame of the Rover Lookdown camera which has a bit of the current location and is higher resolution than the HiRISE mosaic. It is a bit blurry because the Descent Stage had not fully stabilized and is from a more oblique perspective. But the registration went pretty well. Here is how the map looks with that frame (and higher contrast):
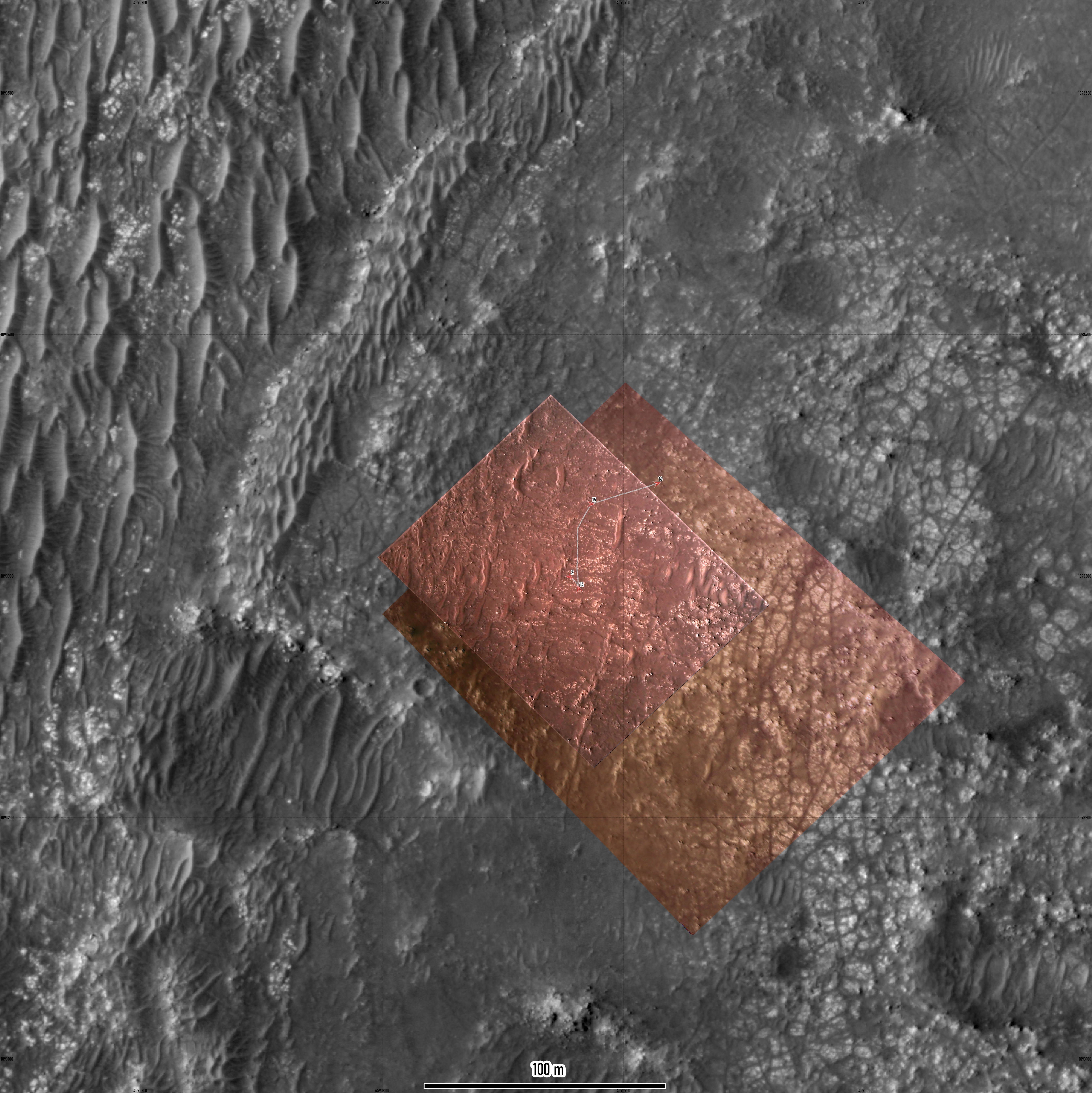
The width of the traverse path is 0.5 m.
The boulders are imaged quite a bit better than in the HiRISE mosaic.
The width of the traverse path is 0.5 m.
The boulders are imaged quite a bit better than in the HiRISE mosaic.
Iteratively building these maps. I have added the two SuperCam target names now, one on each map.
Phil
Click to view attachment
Click to view attachment
Phil
Click to view attachment
Click to view attachment
Thanks as always Phil. This is a great resource.
For those of you who might want to navigate this trip with Google Mars/Earth, as well, I've prepared some overlays using the large basemaps created by the USGS that were mentioned earlier in this thread.
The overview map is 5322x5040 with 6m/pixel resolution:
Click to view attachment
The larger 6.9GB map was broken into manageable 4000x4000 tiles with 0.25m/pixel resolution:
Click to view attachment
You can see some overlays of the various HiRISE and rover downcam images.
For the rover track, I cobbled together a script that scrapes the "Where is Perseverance?" web page. Right now I have to run the script manually, but plan to automate it once I can make it more robust.
You can download a zip file (55MB) with everything or download files individually at the site.
Additional map tiles will be added to the site soon to accommodate the planned route.
The elevation data currently used by GE is low resolution, so only the largest features like the crater rim render well with everything else looking kind of flat.
One thing I like about GE is that it provides an easy way to geolocate the interesting images presented in this forum for future reference.
Mark
The overview map is 5322x5040 with 6m/pixel resolution:
Click to view attachment
The larger 6.9GB map was broken into manageable 4000x4000 tiles with 0.25m/pixel resolution:
Click to view attachment
You can see some overlays of the various HiRISE and rover downcam images.
For the rover track, I cobbled together a script that scrapes the "Where is Perseverance?" web page. Right now I have to run the script manually, but plan to automate it once I can make it more robust.
You can download a zip file (55MB) with everything or download files individually at the site.
Additional map tiles will be added to the site soon to accommodate the planned route.
The elevation data currently used by GE is low resolution, so only the largest features like the crater rim render well with everything else looking kind of flat.
One thing I like about GE is that it provides an easy way to geolocate the interesting images presented in this forum for future reference.
Mark
... and to continue the discussion on registration of the json track data from the "Where is Perseverance?" page with the USGS basemap, here's the post-landing HiRISE image layered on top of the Google Earth tiles:
Click to view attachment
This overlay and the downcam overlays (below) were manually registered (to the best of my ability and patience) with the Google Earth tiles derived from the USGS basemaps. These tiles were extracted from the original equirectangular basemap with a program using the supplied metadata (so no human inaccuracies).
Click to view attachment
So, yeah, there seems to be general agreement with the other maps here...
Mark
Click to view attachment
This overlay and the downcam overlays (below) were manually registered (to the best of my ability and patience) with the Google Earth tiles derived from the USGS basemaps. These tiles were extracted from the original equirectangular basemap with a program using the supplied metadata (so no human inaccuracies).
Click to view attachment
So, yeah, there seems to be general agreement with the other maps here...
Mark
This is the sol 20 drive. The location should be good, the path is an estimate.
Phil
Click to view attachment
Phil
Click to view attachment
Here is my best estimate of the current location, at sol 20 after the drive:

The rectangle is the approximate foot print of the rover, to scale.
This is mostly based on analysis of this Navcam image:

Starting from the dark, small, almost boulder free crater in the middle ground (apparently a word), I believe one can identify sets of boulders to track back to the rover. I guess we will see soon enough.
The crater seems really smooth and may be a good arena for heli testing. There are a few ripples, so perhaps the rover would not venture inside.
The rectangle is the approximate foot print of the rover, to scale.
This is mostly based on analysis of this Navcam image:
Starting from the dark, small, almost boulder free crater in the middle ground (apparently a word), I believe one can identify sets of boulders to track back to the rover. I guess we will see soon enough.
The crater seems really smooth and may be a good arena for heli testing. There are a few ripples, so perhaps the rover would not venture inside.
Click to view attachment
Sol 20 update with newly available raw EDL images.
I would not recommend GE for geo-referencing of images as it only allows 4 (corner) control points.
Sol 20 update with newly available raw EDL images.
I would not recommend GE for geo-referencing of images as it only allows 4 (corner) control points.
My estimate was a few meters off. With the latest geojson:

The width of the path corresponds to the width of the rover (ca. 2.7m).
https://mars.nasa.gov/mmgis-maps/M20/Layers..._waypoints.json now also has a few more fields: distance, drive and elevation among them.
In the helicopter introduction last night, they mentioned that its range could be about 100m x 30m, after initial shorter tests.
The width of the path corresponds to the width of the rover (ca. 2.7m).
https://mars.nasa.gov/mmgis-maps/M20/Layers..._waypoints.json now also has a few more fields: distance, drive and elevation among them.
In the helicopter introduction last night, they mentioned that its range could be about 100m x 30m, after initial shorter tests.
For the Google Mars track, there's now an automatic update ability available for the client side. What this means is that Google Mars will check for an update every 6 hours (while GM is open) or you can manually refresh the track. This will download the track from my server. However, the track on my server is still only updated manually by me running a script so there will be some (human induced) latency until I fully automate the back-end (which will be soon).
Download & open track-updater.kmz and move it to the "mars2020" folder on the GM side panel. You can delete the old "track sols 2-16" folder. The new "track-updater" folder will automatically refresh in the future. To manually refresh, there's a refresh menu item when right-clicking track-updater. If you want, you can change the refresh interval or disable it by going to the Properties>Refresh tab.
Here's a look at the current track:
Click to view attachment
Note: While all the waypoints and traverses are displayed correctly, they are listed out of order on the side panel. This will be fixed in the next automatic refresh now that I've studied the json data a little closer.
Mark
Download & open track-updater.kmz and move it to the "mars2020" folder on the GM side panel. You can delete the old "track sols 2-16" folder. The new "track-updater" folder will automatically refresh in the future. To manually refresh, there's a refresh menu item when right-clicking track-updater. If you want, you can change the refresh interval or disable it by going to the Properties>Refresh tab.
Here's a look at the current track:
Click to view attachment
Note: While all the waypoints and traverses are displayed correctly, they are listed out of order on the side panel. This will be fixed in the next automatic refresh now that I've studied the json data a little closer.
Mark
The images for the last couple of days have not been helpful for making panoramas so it's taken a while to get to this map. Update to sol 23 - a drive back along the tracks away from the belly pan.
Phil
Click to view attachment
I register my maps to the HiRISE orthophotos, so they share projection details with those images. There may be small mis-matches between the various maps appearing in this thread but they are not worth worrying about, they all tell essentially the same story.
Phil
Click to view attachment
I register my maps to the HiRISE orthophotos, so they share projection details with those images. There may be small mis-matches between the various maps appearing in this thread but they are not worth worrying about, they all tell essentially the same story.
Here is a map using the latest geojson, with registered EDL downlook imagery. The width of the path is 2.7m, the black circles are 1m in diameter. The faint arrows show yaw as reported in the way points. The projection is orthographic, centered at the landing ellipse (77.4298 E, 18.4663 N).

Some members have observed, and I agree, that this thread has drifted a bit from its intent. For our new members, Phil's map threads have generally served as navigation/situational awareness reference resources on UMSF for every rover since Spirit to help us all follow the journeys in those ways. Naturally, some questions and observations occasionally pop up in them but this has turned into a full-blown tech discussion.
I was gonna create a new Mars Cartography thread, but lo and behold it turns out that we have one already conveniently called Mars Cartography. 15 posts have been moved there, and I encourage all to please continue that most interesting and informative discussion there. Thanks!
I was gonna create a new Mars Cartography thread, but lo and behold it turns out that we have one already conveniently called Mars Cartography. 15 posts have been moved there, and I encourage all to please continue that most interesting and informative discussion there. Thanks!
Good idea.
I have adjusted the base of my intermediate scale map to include the Belly Pan location, so here is an update to sol 23.
Phil
Click to view attachment
I have adjusted the base of my intermediate scale map to include the Belly Pan location, so here is an update to sol 23.
Phil
Click to view attachment
This map shows feature names around the landing area mentioned at LPSC today. There are some diacriticals which I have not figured out yet, but which will be added later.
Phil
Click to view attachment
Phil
Click to view attachment
Click to view attachment
map update
map update
Using Hazcams I have plotted the path to sol 31.
Phil
Phil
The partial panorama in the early drives thread gives the path and location for sol 32.
Phil
Click to view attachment
Phil
Click to view attachment
Phil, I took your route map and superimposed a photo from JPL of the flight zone of Ingenuity. You can see they got very close to the drop off point with the latest drive.
 location_sol_32 + flight zone
location_sol_32 + flight zone
location_sol_32 + flight zone
Thanks! Very useful.
Phil
Phil
Another map based on the NASA geojson with simulated wheel tracks, 2.7m apart, pills from the traverse data, yaw arrows at way points, the airfield target and the overlook position:

And a full map with more context:

And a full map with more context:
Click to view attachment
Sol 32 update.
Sol 32 update.
We have just 5 images from sol 33 down from Perseverance as I write this, but with one Navcam and one rear Hazcam there is enough information to approximate the drive:
Click to view attachment
Phil
Click to view attachment
Phil
sol 33 update: The flight zone is 30m wide in this map.

full map

full map
QUOTE (Phil Stooke @ Mar 26 2021, 07:51 AM) 
Quick update for the drive to the airfield on sol 34.
Phil, could you please (at least for the Ingenuity test period) mark the Helipad (3x3 m) and Airfield (10x10 m) borders into your map for our better orientation?
Thanks
Click to view attachment
Sol 34 map update. Colored using merged RGB HiRise image.
Click to view attachment
Airfield closeup.
Sol 34 map update. Colored using merged RGB HiRise image.
Click to view attachment
Airfield closeup.
Click to view attachment
https://arkeomapia.si/3d/mars2020/index.html
3D version of the map showing the flying zone. Not perfect, but you can pan around freely.
https://arkeomapia.si/3d/mars2020/index.html
3D version of the map showing the flying zone. Not perfect, but you can pan around freely.
[quote name='Andreas Plesch' date='Mar 25 2021, 10:43 PM' post='251192']
sol 33 update: The flight zone is 30m wide in this map.
So nice. Thank you!
How did you place the tracks? Visual references or are they just parallel to the path?
sol 33 update: The flight zone is 30m wide in this map.
So nice. Thank you!
How did you place the tracks? Visual references or are they just parallel to the path?
QUOTE (MarkL @ Mar 26 2021, 08:31 AM)
How did you place the tracks? Visual references or are they just parallel to the path?
Glad that it is useful. Making the maps helped me understand the area better. The simulated tracks are just parallel to the traverse path from the geojson data, with an offset to indicate the 2.7m width of the rover. I think the plotted track marks are 40cm wide. I could not figure out if the cited 2.7m width refers to just the body of rover, or if it includes the wheels sticking out on the sides. I am using QGIS which makes makes it possible to do all that pretty quickly and accurately. It would be nice to simulate the rotational turns but I am not sure if there is enough data available (other than the imagery) and also do not have an idea how at this point.
Thanks Andreas. Keep up the great work!
This is a "lo-fi" version of our main content. To view the full version with more information, formatting and images, please click here.