QUOTE (JES @ May 4 2005, 10:03 AM)
Any changes in the strategy for driving the rover will depend upon what has caused its current problem. Several questions come to mind:
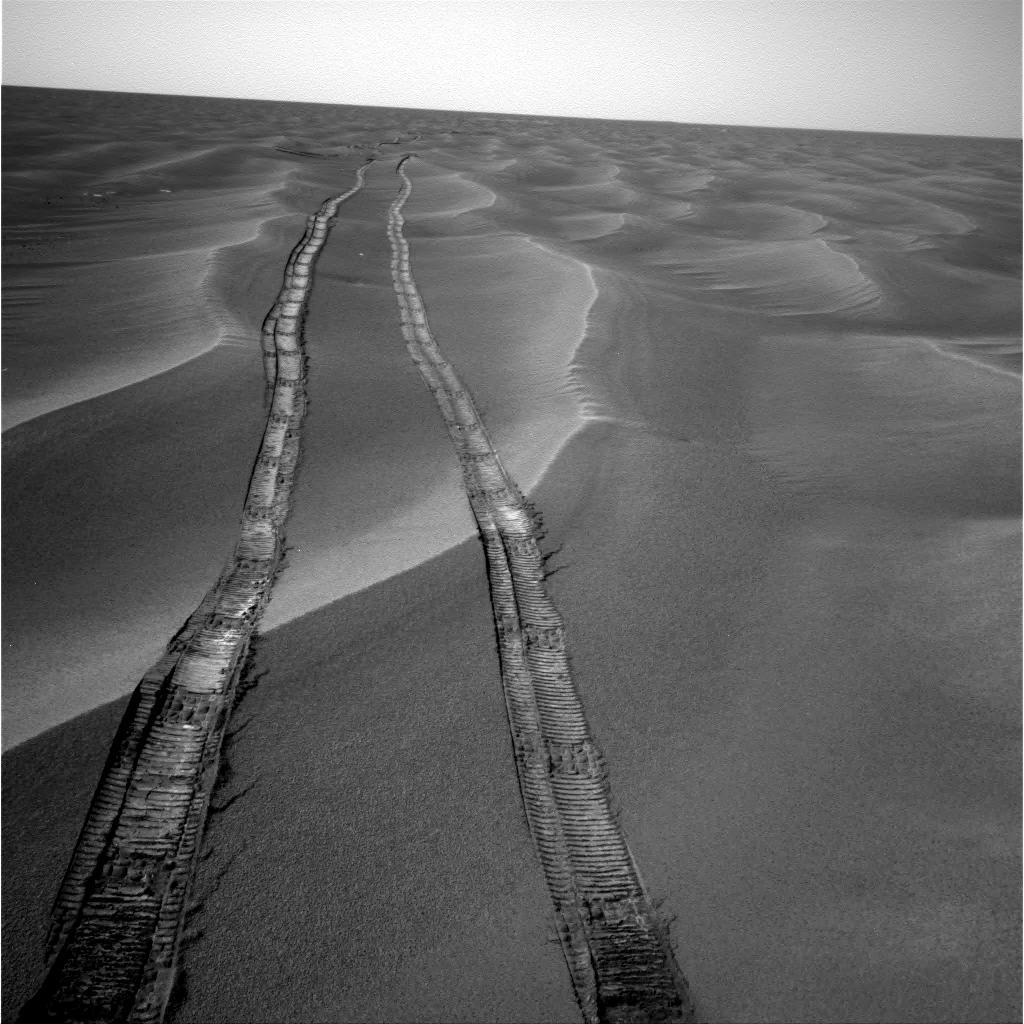
What exactly caused the wheels to dig in? Did the front wheels dig in because the density of the surface material was so much less? Was the angle of attack and specific load on the wheel different in this approach than with other dunes that have been crossed? To what extent have conditions changed or was this the result of a bad combination of previous condition? Is this situation the result of unique conditions that can be avoided?
If soil deposits are building up on the rovers approach side of the dunes only we may be able to adjust the angle of approach to float lead wheels over the softer areas with less load on the approach wheel by varying the approach angle. Assuming that the windward side of the dunes have less low density topping, it may be possible to move parallel with the waves with greater confidence. Crossing over dunes would require more guidance from home.
Do we have adequate mapping of the etched terrain to find a track through the maze that leads to the crater?

What exactly caused the wheels to dig in? Did the front wheels dig in because the density of the surface material was so much less? Was the angle of attack and specific load on the wheel different in this approach than with other dunes that have been crossed? To what extent have conditions changed or was this the result of a bad combination of previous condition? Is this situation the result of unique conditions that can be avoided?
If soil deposits are building up on the rovers approach side of the dunes only we may be able to adjust the angle of approach to float lead wheels over the softer areas with less load on the approach wheel by varying the approach angle. Assuming that the windward side of the dunes have less low density topping, it may be possible to move parallel with the waves with greater confidence. Crossing over dunes would require more guidance from home.
Do we have adequate mapping of the etched terrain to find a track through the maze that leads to the crater?
I wonder if the stuck steering actuator might have helped to break the duracrust? Since the rover isn't moving perfectly straight, the slight sideways motion it experiences might provide the right kind of force to break through. Either that, or there was just too much loose sand underneath, and the weight was just finally enough to break through.