Mode5
May 25 2005, 10:25 PM
QUOTE (Trader @ May 25 2005, 05:41 PM)
"I was looking some image sent from 'today' which shows it still on the lander. It's amazing they didn't transmit and purge these earlier with the mem problems. "
Could one conclude that the massive downloads of the last few days were intended to lighten the rover and assist in getting her unstuck?


you know how they say you can see your life flash before your eyes when you d...

*gulp*
Seriously, what amazes me is how the two rovers have balanced out the scientific discoveries/work load. While Opie is stuck Spirit is now giving its best data so far. It's like watching two channels on the television and flipping back and forth.
Burmese
May 26 2005, 12:25 PM
More steady progress. Is it my imagination or does Oppy have a slight forward tilt now?
http://qt.exploratorium.edu/mars/opportuni...K7P1214L0M1.JPGhttp://qt.exploratorium.edu/mars/opportuni...K7P1314L0M1.JPGThe right front wheel seems to be rising, despite being set in the deeper part of the dune - perhaps the solid ground below rises a bit at that point.
dot.dk
May 26 2005, 12:45 PM
JES
May 26 2005, 12:46 PM
QUOTE (djellison @ May 24 2005, 03:06 PM)
......If they were to go straight back down their own trenches, the wheels could end up just churning all the way. By turning the craft a little to 'push' against the left side of the trenches, it gives them something 'new' to have a bite at and pull up out the trenches I guess.
Doug
I remember reading that they were exiting on an arc. Wouldn't we be seeing the wheels biting into the side of the trench a bit and perhaps trying to ride up the side a bit? Or are they keeping the angle at a minimum to increase friction at the side without trying to push into the side. I would think that any displaced material from the side wall would fall into the oncoming track and help raise the wheels up as the rover backs out.

maycm
May 26 2005, 07:10 PM
Apologies if this has already been posted.
Here's a polar shot of Oppys present-ish position.

There's a medium res version
HERE
dot.dk
May 27 2005, 09:30 AM
Interesting! In todays drive they seem to have turned the left front wheel slightly, perhaps the same amount as the 7 degree as the right front.

Marcel
May 27 2005, 09:35 AM
QUOTE (dot.dk @ May 27 2005, 09:30 AM)
Interesting! In todays drive they seem to have turned the left front wheel slightly, perhaps the same amount as the 7 degree as the right front.
Which is very smart i'd say ! Turning wheels in different directions only displace material unnecessary, which costs energy, that is not invested in movement !
Sunspot
May 27 2005, 10:12 AM
How would you rate Opportunity's progress so far? Do you think things are going well or not?
It's interesting (as others have pointed out) that the rover doesn't seem to be rising up out of the soil. I wonder if the depth of the rear wheels is preventing the front wheels from climbing up out of the trenches.
Tesheiner
May 27 2005, 10:25 AM
QUOTE (dot.dk @ May 27 2005, 11:30 AM)
Interesting! In todays drive they seem to have turned the left front wheel slightly, perhaps the same amount as the 7 degree as the right front.
Perhaps they want to finish this "left arc" and go straight ahead.
As others pointed out, we can see the effects of this arc on the trenches made by the rear wheels and probably the contact with the side of these trenches add some drag to the forward movement.
But it is just a guess...
Tesheiner
Marcel
May 27 2005, 11:13 AM
QUOTE (Sunspot @ May 27 2005, 10:12 AM)
How would you rate Opportunity's progress so far? Do you think things are going well or not?
I'm not so pessimistics. Eventually, she'll come out I'd guess. But, this could take a long time.
There are three scenario's:
1 The wheels will lift (almost) on top of the soil as soon as she reaches the point where the wheels turned the soil over while digging in weeks ago (about 1 meter from her present position)
2 The wheels will keep on milling around for meters (slowly crawling on like she did last weeks) until one of the cleats of the wheels hits firm rock (evaporite), that will help her out.
3 She won't be able to climb out the dirt soon and keeps on going like this, which will sooner or later cause problems in her bearings/actuators in the wheel (with all these fines).
I hope it's the first one. The second one is fine to me too. The third is horror.
I think (hope) it does not have anything to do with a crust or something, but with the other nature of the last meters of soil.
Cugel
May 27 2005, 11:22 AM
I'm new to this topic, so maybe it has been discussed before, however...
As I understand it the problem that Oppy is now in resulted not so much from getting stuck in the dune field, but more in persistent rotation of the wheels when the rover was actually not moving forward. I believe I have read somewhere that the rover got stuck roughly halfway in a long range drive, so after 40 or 50 meters in a 100 meter drive.
However, once it got stuck the software failed to notice this and simply 'completed' the drive. (Correct me if I'm wrong about this) I think this caused the wheels to really dig in deep, which is why it is so difficult to get out afterwards. Had the software stopped the wheels on time, the rover would have backed out much more easily. If this assumption is correct it would mean that driving deeper into the Etched Terrain would not be that risky, with the software properly configured that is... Or is this a bit too optimistic from my side?
Marcel
May 27 2005, 12:05 PM
QUOTE (Cugel @ May 27 2005, 11:22 AM)
I'm new to this topic, so maybe it has been discussed before, however...
As I understand it the problem that Oppy is now in resulted not so much from getting stuck in the dune field, but more in persistent rotation of the wheels when the rover was actually not moving forward. I believe I have read somewhere that the rover got stuck roughly halfway in a long range drive, so after 40 or 50 meters in a 100 meter drive.
However, once it got stuck the software failed to notice this and simply 'completed' the drive. (Correct me if I'm wrong about this) I think this caused the wheels to really dig in deep, which is why it is so difficult to get out afterwards. Had the software stopped the wheels on time, the rover would have backed out much more easily. If this assumption is correct it would mean that driving deeper into the Etched Terrain would not be that risky, with the software properly configured that is... Or is this a bit too optimistic from my side?
Yes, Cugel, this has been discussed before. Detecting slippage is only possible in autonomous navigation mode. This digging in probably happened during a blind drive command.
What i was wondering however: They KNOW where they came from in the last drive that ended in this deep. They KNOW at which point they started slipping from imagery. Subtract these distances and you'll get the ratio between wheel motion and actual displacement within this horrendous last meters. This gives us the function that has been posted earlier this threat.
What i was wondering: is this function while digging in the same as it is now, while trying to get out again ? If it is, i am confident that in the end she'll get out within the same amount of wheel revolutions as it took her to get in.
Then there's only one question left for me: how many meters was the commanded drive that got her in the deep ? This might give me the opportunity to win the mars bar in the other threat.......by guessing the sol she'll be up and running again !
Cugel
May 27 2005, 12:57 PM
QUOTE (Marcel @ May 27 2005, 12:05 PM)
QUOTE (Cugel @ May 27 2005, 11:22 AM)
I'm new to this topic, so maybe it has been discussed before, however...
As I understand it the problem that Oppy is now in resulted not so much from getting stuck in the dune field, but more in persistent rotation of the wheels when the rover was actually not moving forward. I believe I have read somewhere that the rover got stuck roughly halfway in a long range drive, so after 40 or 50 meters in a 100 meter drive.
However, once it got stuck the software failed to notice this and simply 'completed' the drive. (Correct me if I'm wrong about this) I think this caused the wheels to really dig in deep, which is why it is so difficult to get out afterwards. Had the software stopped the wheels on time, the rover would have backed out much more easily. If this assumption is correct it would mean that driving deeper into the Etched Terrain would not be that risky, with the software properly configured that is... Or is this a bit too optimistic from my side?
Yes, Cugel, this has been discussed before. Detecting slippage is only possible in autonomous navigation mode. This digging in probably happened during a blind drive command.
What i was wondering however: They KNOW where they came from in the last drive that ended in this deep. They KNOW at which point they started slipping from imagery. Subtract these distances and you'll get the ratio between wheel motion and actual displacement within this horrendous last meters. This gives us the function that has been posted earlier this threat.
What i was wondering: is this function while digging in the same as it is now, while trying to get out again ? If it is, i am confident that in the end she'll get out within the same amount of wheel revolutions as it took her to get in.
Then there's only one question left for me: how many meters was the commanded drive that got her in the deep ? This might give me the opportunity to win the mars bar in the other threat.......by guessing the sol she'll be up and running again !
OK, thanks for the response Marcel. I guess that would mean that any progress through this sort of terrain will be a lot slower in the future. By the way, I don't think that digging in can be considered the reversal of digging out. They actually do not dig out at all, just bulldozering a new trench all the way out.
dvandorn
May 27 2005, 01:20 PM
QUOTE (Marcel @ May 27 2005, 07:05 AM)
Then there's only one question left for me: how many meters was the commanded drive that got her in the deep ? This might give me the opportunity to win the mars bar in the other threat.......by guessing the sol she'll be up and running again !
I believe she did wheel turns for about 40 meters of driving without moving at the end of that last blind drive. I also believe I have read that it will likely take more turns than that to get her out -- but the exact number, no one knows.
-the other Doug
Marcel
May 27 2005, 01:40 PM
QUOTE (Cugel @ May 27 2005, 12:57 PM)
By the way, I don't think that digging in can be considered the reversal of digging out.
That's exactly what i am trying to find out by comparing nowadays attempts to get out with the numbers of getting in. And IF these (slippage)numbers are the same: you can get the best estimate when she'll be back to "normal".....assuming that only the last meter or so is loose material...
dot.dk
May 27 2005, 03:51 PM
According to this:
http://www.space.com/imageoftheday/image_of_day_050527.htmlOpportunity has now spun it's wheels for 48 meters and gained about 28 cm.
But the interesting thing in the image is that apparently the difference between the red and green areas is 70 cm!!
It's really not easy to see this big difference from the cameras on the rover because of the uniform terrain.
This means the difference between the area just in front of the rover and the area just behind it has a 70 cm difference in height!
No wonder it got stuck
CosmicRocker
May 28 2005, 07:27 AM
dot.dk: Good catch on the wheel turn. That 70 cm of elevation change is also interesting news. I am guessing that they have already compensated for the right turn Opportunity made as it ploughed into this dune, and they now want to turn into the trough on the way back out.
Others have wondered how the progress has been so far. I posted some graphs of progress efficiency in another thread.
http://www.unmannedspaceflight.com/index.p...indpost&p=11238 In retrospect, I probably should have posted them here.
The plots display centimeters advanced versus meters attempted, and include data published by JPL and the recent article from space.com. The going has not been getting any better (as we all can see), but the data is a few sols old. As others have pointed out, the latest data point from space.com indicates that 48 meters of attempted driving has occurred, and Opportunity has not gone as far back as she had previously ploughed ahead in 50 meters of attmpted driving.
At least she is still making progress, but I really was expecting progress to get better by now. I would sure like to get some newer data to add to the plots.
dilo
May 28 2005, 07:33 AM
Last 12 days progress from both hazcam full frames (right):
http://img283.echo.cx/my.php?image=rearhazcamr6sp.gifhttp://img290.echo.cx/my.php?image=fronthazcamsmall8yx.gif(sorry for poor quality, but there are restrictions on postable GIF files size

)
Sunspot
May 28 2005, 09:11 AM
WOW..........lots of forward progress, interesting how the depth to which the wheels are buried seems to stay the same.
The front right wheel has the stuck steering actuator, if at some point it rises up out of the trench a little more, do you think they would attempt to turn the rover?
CosmicRocker
May 28 2005, 06:07 PM
Steve Squyres has a new update out today.

It's longer than usual, too. Only one paragraph on Opportunity, pretty much confirming what the plots showed. There is a lot of good stuff on Spirit, though.
http://athena1.cornell.edu/news/mubss/"Nothing really new at Meridiani. We're seeing slow, steady progress, at a remarkably constant rate. For ever meter of wheel turns that we command, we get half a centimeter of actual motion. It's been like this since the start of the extraction process. We're typically doing 12 meters of wheel turns a day, and typically seeing about six centimeters of motion. We'll get out of here eventually, but it's a slow, laborious process."
alan
May 28 2005, 09:09 PM
QUOTE (dot.dk @ May 27 2005, 09:30 AM)
Interesting! In todays drive they seem to have turned the left front wheel slightly, perhaps the same amount as the 7 degree as the right front.
The left front wheel appeared to be getting bogged down before they made the turn. It seems to be making better progress now. Rubbing against the side of the trench must have been slowing it down.
dilo
May 30 2005, 06:17 AM
QUOTE (alan @ May 28 2005, 09:09 PM)
The left front wheel appeared to be getting bogged down before they made the turn. It seems to be making better progress now. Rubbing against the side of the trench must have been slowing it down.
Here unusual animated view of Front-Left wheel from PanCam (notice Sol number in the left/bottom angle):

Interesting to see how much terrain is displaced in front to it...
Mode5
May 30 2005, 08:46 AM
Thank you for putting that together.
Am I the only one to find this excruciating to watch? I just want to walk over to it, pick it up and send it on its way. The pictures really put this struggle into perspective. I find myself viewing that, clenching my fists and saying to myself, "go, go!".
Looking at the lower edge, which is very well defined, it does appear that they are moving slightly out of the track.
Tman
May 30 2005, 02:07 PM
Hi dilo, I've allowed me to continue your animation from May 28:
http://www.greuti.ch/oppy/oppy_front_sol460-479.gifI think we have circa arrived the point where Oppy's middle wheels (and rear wheels?) sinked. Hopefully the front wheels become raised now in next sols.
dilo
May 30 2005, 05:34 PM
QUOTE (Tman @ May 30 2005, 02:07 PM)
Hi dilo, I've allowed me to continue your animation from May 28:
http://www.greuti.ch/oppy/oppy_front_sol460-479.gifI think we have circa arrived the point where Oppy's middle wheels (and rear wheels?) sinked. Hopefully the front wheels become raised now in next sols.
Great, Tman! Here also full-res comparison week-to-week:

Richard Trigaux
May 30 2005, 08:27 PM
Does anyone noted that the bogging starts, not when the slope of the current dune begins, but at the end of the descending slope of the previous dune.
This can lead to a new explanation of what happened:
1) when Oppy was on the previous dune, she found a descending slope with an angle greater than all the previous
2) arriving at the bottom of this dune, due to her very inclinated position, Oppy nosed into the sand
3) due to nosing, the leading wheels began to dig into the ground
4) due to leading wheels into the ground, the rear wheels began digging
5) then Oppy was unable to recover a safe position, especially when the ascention of the current dune began.
Edward Schmitz
May 30 2005, 08:50 PM
removed un-necessary quoting - see http://www.unmannedspaceflight.com/index.php?showtopic=988 :Doug No, the slippage did not occur until it was acsending the next dune. The front wheels (it was going backward) were at the bottom but the rear wheels were well up the next dune. All the wheels started slipping at the same time. You can't have the two forward wheels getting stuck and still have the other four making progress.
Tesheiner
May 31 2005, 04:52 PM
Hi all,
On this image you can see the (approximate) position of the left wheel on Sols 472 and 479, based on the front hazcam "movies".
The background picture is of Sol 461.
Currently there is no official report about the actual progress after sol 475, but my estimation for 472-479 is around 27cm net advance.
Tesheiner
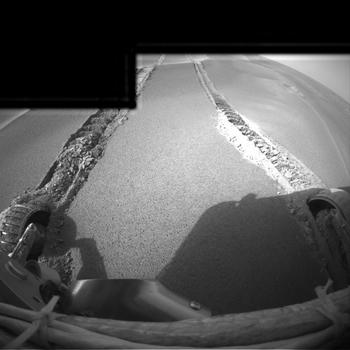
Sunspot
May 31 2005, 06:43 PM
If you take a close look at this latest hazcam image you can see the track of what i assume was the middle wheel - which stayed on the surface and didnt trench in to the soil as soon as the other wheels (front wheel?)
http://qt.exploratorium.edu/mars/opportuni...RGP1214L0M1.JPGAs the rover moves forward, some of the soil must be pushed to the sides - I wonder what will happen when it meets the trench from the single wheel track?
mhoward
Jun 1 2005, 03:10 PM
It looks to me like Oppy made better progress on Sol 481. It's a little harder to see in the forward hazcam images until you look carefully at the landmarks, but it's quite obvious in the rear hazcam. Maybe we will finally be out of this drift soon???
Tesheiner
Jun 1 2005, 03:21 PM
Oppy were commanded on previous sols (476-480) to 12m drives executed in 30 steps of 0.4m.
Today's drive is different. Less steps (actually 10, from RG to S0) but bigger ones.
And as mhoward noted, better progress.
I should add that the forward left wheel was turned again a bit to the right .
Tesheiner
dot.dk
Jun 1 2005, 03:23 PM
Latest hazcam pics looks VERY good!

Both the left/right rear and front left is rising! The rear wheels must have reached were the middle wheels started now.
Go Oppy Go!

Tesheiner
Jun 1 2005, 03:30 PM
QUOTE (Tesheiner @ Jun 1 2005, 05:21 PM)
Oppy were commanded on previous sols (476-480) to 12m drives executed in 30 steps of 0.4m.
Today's drive is different. Less steps (actually 10, from RG to S0) but bigger ones.
And as mhoward noted, better progress.
I should add that the forward left wheel was turned again a bit to the right .
Tesheiner
A correction to the previous post:
... but bigger ones
or less drag.
Hopefully it is the second option.
Burmese
Jun 1 2005, 03:47 PM
Yes, I think just a few more days and we can consider Oppy free. But can they do anything to clear the treads? Some of that stuff looks like it intends to stick around, at least until they can roll over som bare rock.
Sunspot
Jun 2 2005, 12:40 PM
Certainly the most the rover has moved in a single sol so far.....it looks like slightly more than one wheel diametre.
Sol 480:
http://qt.exploratorium.edu/mars/opportuni...RGP1214L0M1.JPGSol 481:
http://qt.exploratorium.edu/mars/opportuni...S0P1214L0M1.JPGIf the front wheel wasn't stuck they could probably try a turn in place.
Tesheiner
Jun 2 2005, 01:24 PM
IMO, yesterday's move has a net advance of around 12cm i.e. one wheel radius, about twice the amount of previous days.
Tman
Jun 2 2005, 01:30 PM
It's going more and more exciting - climb or not climb?! Come on, front wheels!
http://qt.exploratorium.edu/mars/opportuni...SKP1214L0M1.JPGBut I think, they will hampered by the other slipping wheels.
Bill Harris
Jun 2 2005, 02:47 PM
My guess is that progress will pick up once Oppy gets out of the interdunal area and onto the backside of the dune ahead.
We'll see what we see when we see it...
--Bill
My guess is that Oppy will pick up speed once the right rear wheel has cut through the 'top' of the dune.
http://qt.exploratorium.edu/mars/opportuni...SKP1314L0M1.JPGIt is the only wheel that has yet to go over the 'ripple', which means that it has to cut through more dirt than the other five wheels and I think it slows the rover down in the process.
I
hope that Oppy will be able to drag all wheels on top of the soil once it's through...

Sunspot
Jun 2 2005, 04:19 PM
We don't know how long these drives were though, they might have been more than the maximum 12m they've tried up until now.
avkillick
Jun 2 2005, 05:15 PM
<glass half full>
I think that Oppy getting stuck like this is a good thing.
From a rover engineering perpective, it has given the team plenty to consider when it
comes to the design of future rovers and the software/hardware that enables them
to traverse the martian surface unimpeded.
They have also been able to explore techniques for extracting a rover from situations like this.
</glass half full>
dilo
Jun 2 2005, 06:39 PM
Last six days movie; impressive raising of left wheel!

NoVi
Jun 2 2005, 07:22 PM
QUOTE (avkillick @ Jun 2 2005, 05:15 PM)
<glass half full>
I think that Oppy getting stuck like this is a good thing.
From a rover engineering perpective, it has given the team plenty to consider when it
comes to the design of future rovers and the software/hardware that enables them
to traverse the martian surface unimpeded.
They have also been able to explore techniques for extracting a rover from situations like this.
</glass half full>
<glass half empty>
I'm a bit worried that these intensive manouvres will have a negative impact on the life span of Oppy...
</glass half empty>
dilo
Jun 2 2005, 07:23 PM
And this is a PanCam detail (pseudo colors created from R1+R2 filters):

garybeau
Jun 2 2005, 08:05 PM
Excellent picture dilo. I'm amazed at how weathered the old tracks already look as compared to the new soil that is getting churned up. It won't take 100 million years for these tracks to be gone.
Tesheiner
Jun 2 2005, 08:17 PM
Hi all,
Here is a panorama made with pancam images of the front left wheel ( sols 461-482 ), overlayed with the wheel position on each site/sol.
It is something like a "route map", but on a very small scale.

Tesheiner
Pando
Jun 2 2005, 09:09 PM
Interesting how the front left wheel is starting to rise to the top of the soil. What they should do now is slow down the spin on the front wheels so that it keeps track of the rover's movement. That way it should just push the front wheels to the top, while the back wheels continue to churn away. Otherwise if the front wheels continue to spin the same rate as the back wheels, they'll just dig in again. They should be able to command the wheel movements independently I believe.
Just a thought...
Give it 2 more weeks I think and it should be out
dot.dk
Jun 3 2005, 12:48 AM
New update from the Steve!
http://athena1.cornell.edu/news/mubss/Looks like the last two drives have been 20 meter and they saw 12 cm of progress.
dilo
Jun 3 2005, 05:00 AM
QUOTE (Tesheiner @ Jun 2 2005, 08:17 PM)
Hi all,
Here is a panorama made with pancam images of the front left wheel ( sols 461-482 ), overlayed with the wheel position on each site/sol.
It is something like a "route map", but on a very small scale.
Tesheiner
Great idea, Tesheiner. Can you kindly explain the meaning of codes like "55RG" in each location? Thanks.
alan
Jun 3 2005, 06:04 AM
This is a "lo-fi" version of our main content. To view the full version with more information, formatting and images, please
click here.







